
Badania nad synchroniczną orientacją danych LIDAR oraz zdjęć fotogrametrycznych
Członkowie zespołu UAV Geolab z Zakładu Fotogrametrii, Teledetekcji i SIP naszego Wydziału prowadzą badania nad synchroniczną orientacją danych LIDAR oraz zdjęć fotogrametrycznych, w ramach realizacji grantu Rady Dyscypliny ILGiT.
Nowym standardem w pozyskiwaniu danych fotogrametrycznych, zarówno z pułapu lotniczego, jak i z bezzałogowych systemów latających (BSL, UAV) jest synchroniczne lub asynchroniczne pozyskiwanie danych z różnych sensorów. Głównym celem projektu są badania nad algorytmem wzajemnej, ścisłej orientacji danych fotogrametrycznych, opartym o mechanizmy automatycznego dopasowania tzw. „chmura do chmury” (ang. Cloud-To-Cloud). W wyniku badań opracowana zostanie metodyka hybrydowej orientacji asynchronicznie pozyskanych z pułapu BSL: danych LIDAR oraz zdjęć.
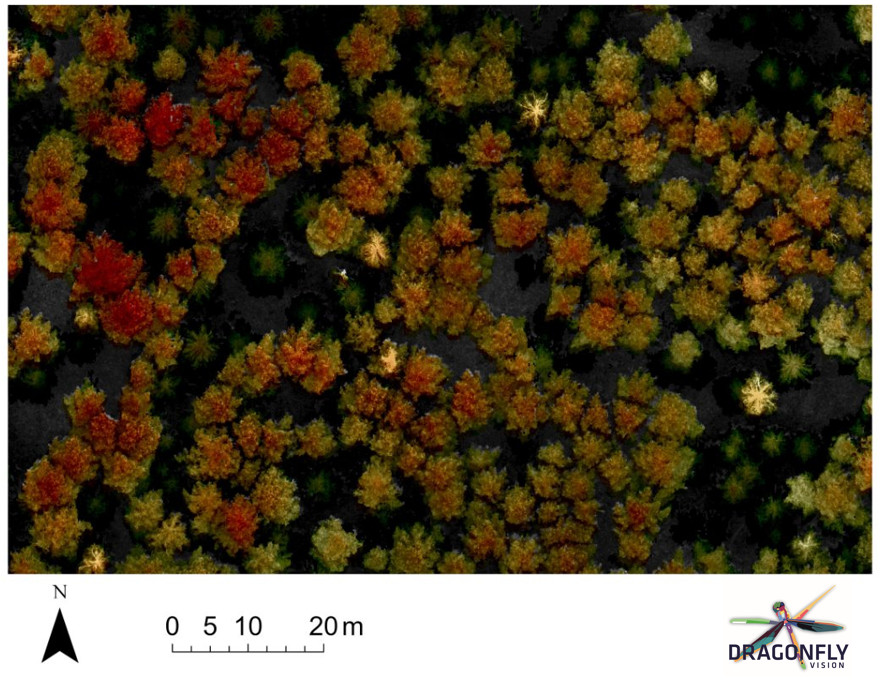
W ramach badań przetestowane zostały dane pozyskane dla terenów podmiejskich i leśnych. Dane dla obszarów leśnych pozyskane zostały multispektralną kamerą MicaSense Dual RedEdge-MX oraz skanerem laserowym GreenValley LiAir V70 (udostępnione przez firmę Dragonfly Vision). Ponadto wykorzystane zostały pozyskane przez zespół dane z kamery DJI Zenmuse P1 oraz skanera laserowego DJI Zenmuse L1 dla terenu z zabudową podmiejską.
Finalnie opracowana metodyka zostanie zaimplementowana w formie algorytmów udostępnionych otwarcie. Wykorzystany został szereg nowych, otwartych rozwiązań programistycznych takich jak język programowania C++, biblioteki Ceres Solver, PDAL, SuiteSparse oraz CUDA Toolkit.
© 1998-2026 Politechnika Warszawska,
Pl. Politechniki 1, 00-661 Warszawa
