Home »
Why this course
Nowadays technologies are characterized by solutions that increasingly support users leading to automation and autonomous work. More complex systems integrate technological solutions from various fields of science. Due to that, it becomes crucial to understand the basic principles of work of an individual system component and its possibilities of integration to achieve an optimal operation of the final applications. Thus, the recent job offers require new specialists who are able to design and configure systems utilizing interdisciplinary technology. Such a specialist must be able to apply and use multiple sensors, dedicated software, Big Data or neural networks analysis.
Why this course
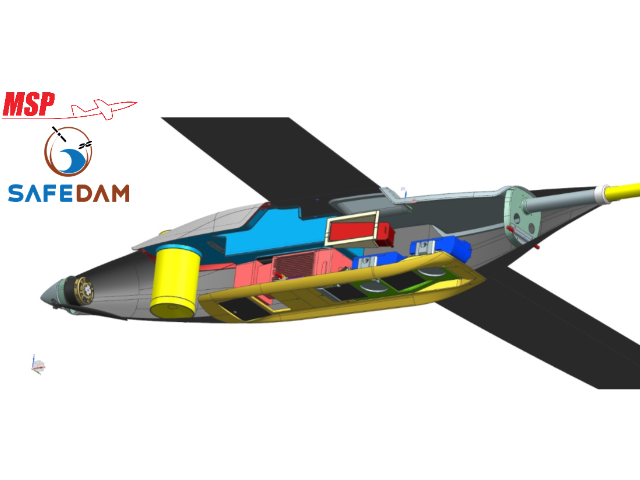
To design mobile measurement platforms (UAV, self-driving cars, MMS/MLS)
You will work with data from aerial and terrestrial mobile platform equipped with optical (images), lidar (laser scanner), GNSS (GPS) sensors providing geospatial information. You will learn basics of sensors location in a platform and relation between them.
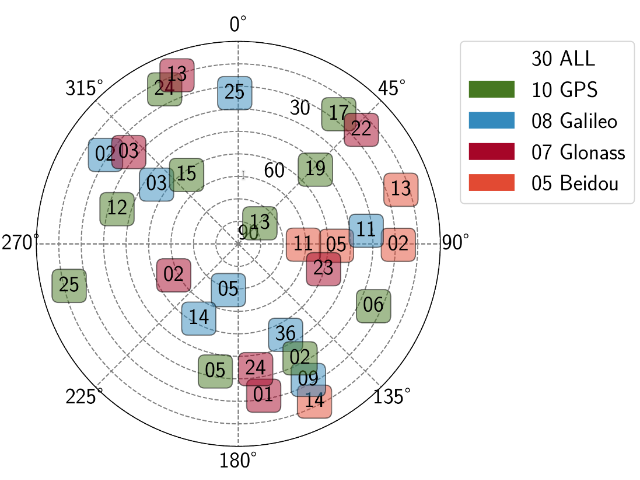
To develop precise positioning systems (GNSS, GNSS/INS)
You will learn how to write an application for precise positioning determination (e.g. DGNSS, RTK) based on data of the GNSS system e.g. GPS. You will write you own application integrating GPS data with INS data to determine accurate and reliable position required by the navigation systems in the urban canyon environments.
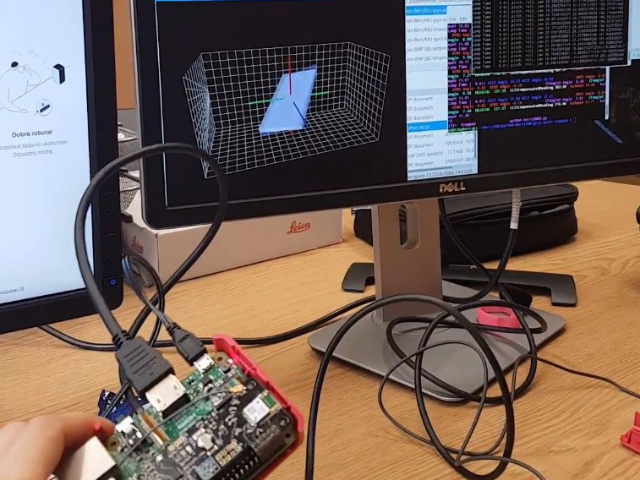
To develop an application for attitude determination and control
You will learn how to determine and control the attitude (yaw, pitch, roll) of a moving vehicle based on GPS and INS data. These parameters are needed to navigate moving vehicle (UAV) moreover they are required for orientation of the other measurement sensors (e.g. camera, LIDAR) with respect to the platform.

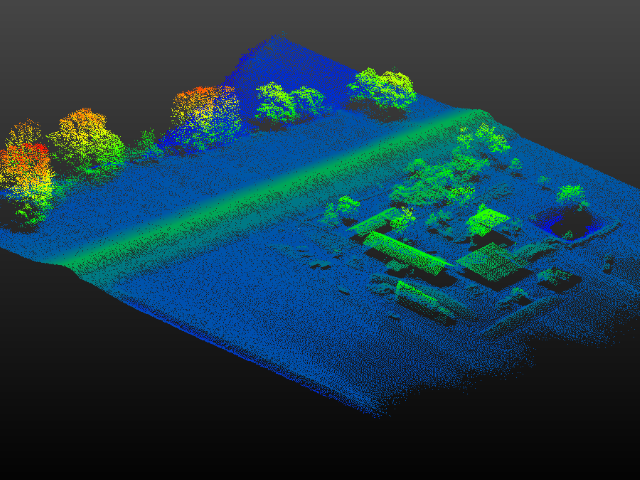
To collect, process and analyse geospatial data from mobile mapping platforms
You will participate in projects of data collection with mobile mapping systems equipped with image-based and lidar-based sensors to acquire geospatial data during platform ride. These data can be applied in the inventory of roads and infrastructure located on it.
To choose appropriate techniques for acquiring spatial data (photogrammetry, remote sensing, computer vision)
You will participate in projects related to data acquisition with UAV systems and other photogrammetric and remote sensing techniques. Low-altitude aerial images are the popular data source for many applications in engineering, natural and human sciences. The processing of images is a popular issue in computer vision. You will learn it and get knowledge about selecting the proper technique in the best approach to receive the appropriate solution.
To develop advanced geovisualization of spatial data for the navigation or other systems
During studies practical classes of cartographic modelling of building interior are the subject of the programme. You will be processing point cloud from laser scanning to 2D and 3D maps for indoor and outdoor navigation.
